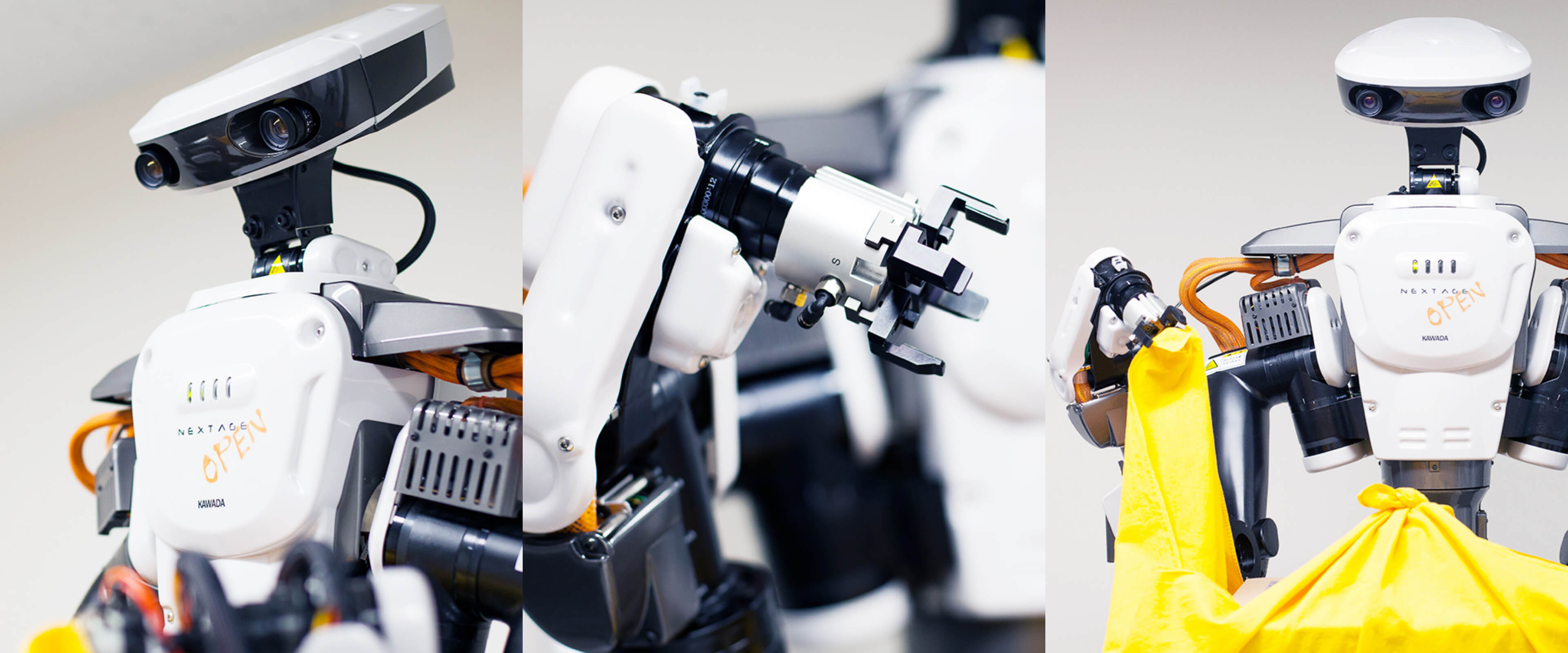
This is an industrial robot developed based on the concept of "coexistence with people." It is a highly versatile robot that works while recognizing the surrounding environment and the target of operation, and can flexibly respond to high-mix, variable-volume production.


The highly workable NEXTAGE hardware is now compatible with ROS, an open middleware environment widely used in research and development. Since it is based on OpenRTM-aist, it has excellent real-time performance. It is a life-sized humanoid platform that can be applied to cutting-edge research and development by linking with a wide variety of ROS-compatible software and devices.
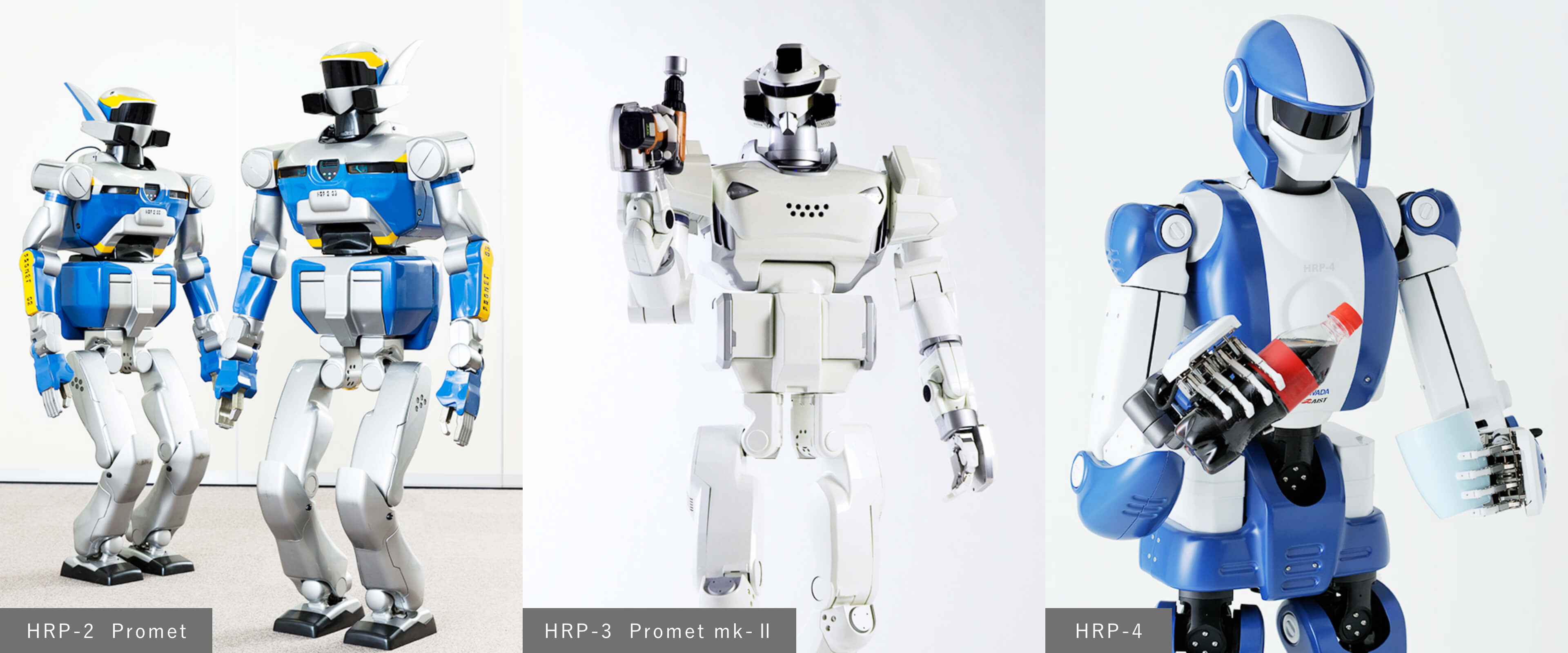


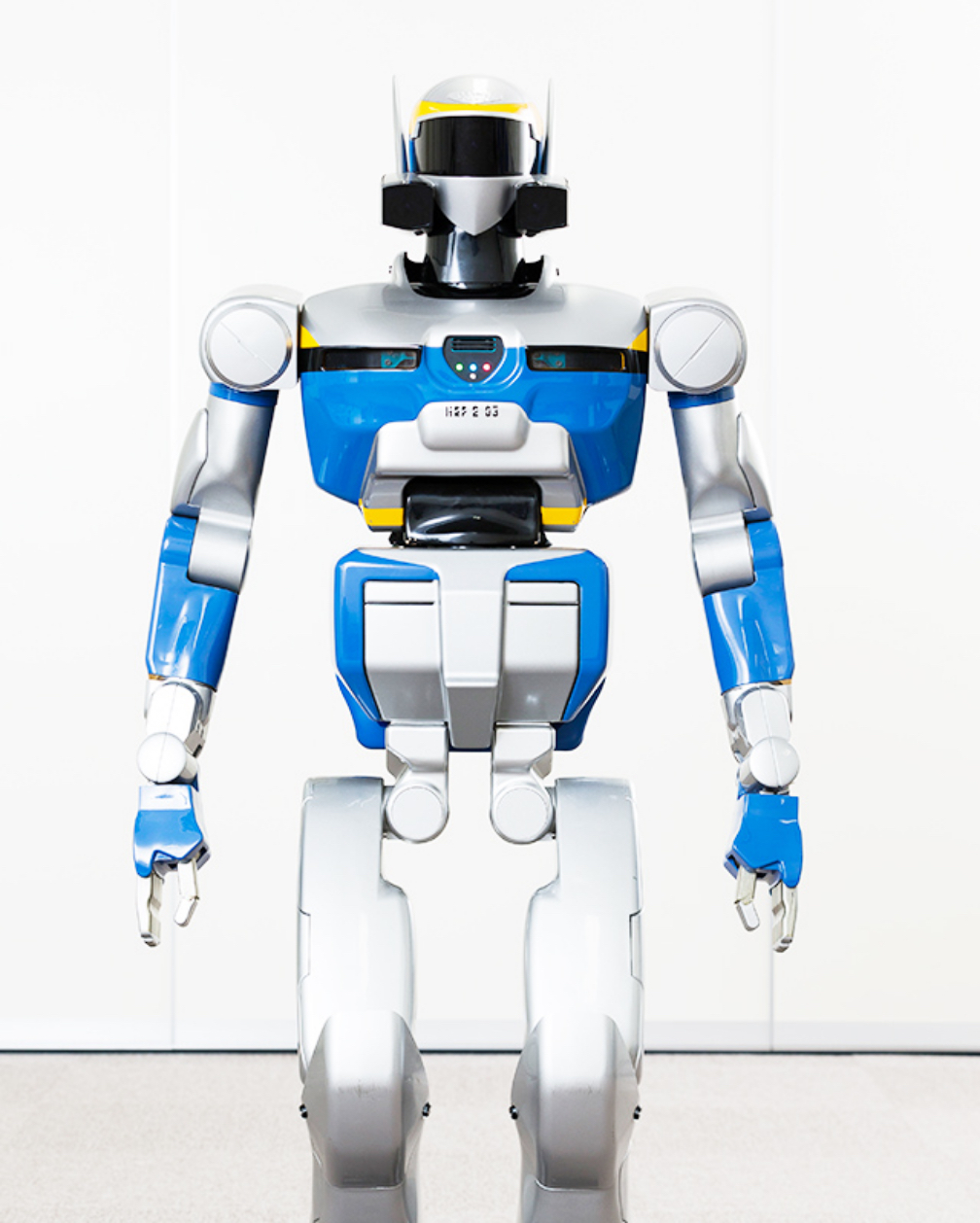
HRP-2 Promet
This robot is the result of the Ministry of Economy, Trade and Industry's "Research and Development of Human-Cooperative and Coexistence Robot Systems." It is characterized by its cantilevered hip joint structure, which enables it to walk on narrow paths, and by the high-density implementation of the electrical system, which eliminates the need for a backpack. As a platform, it contributes to the development of academic research, and in 2017, it was registered as an "Important Historical Material for Science and Technology (Future Technology Heritage)" at the National Museum of Nature and Science.
[Height:154cm, Weight:58kg, 30 degrees of freedom]

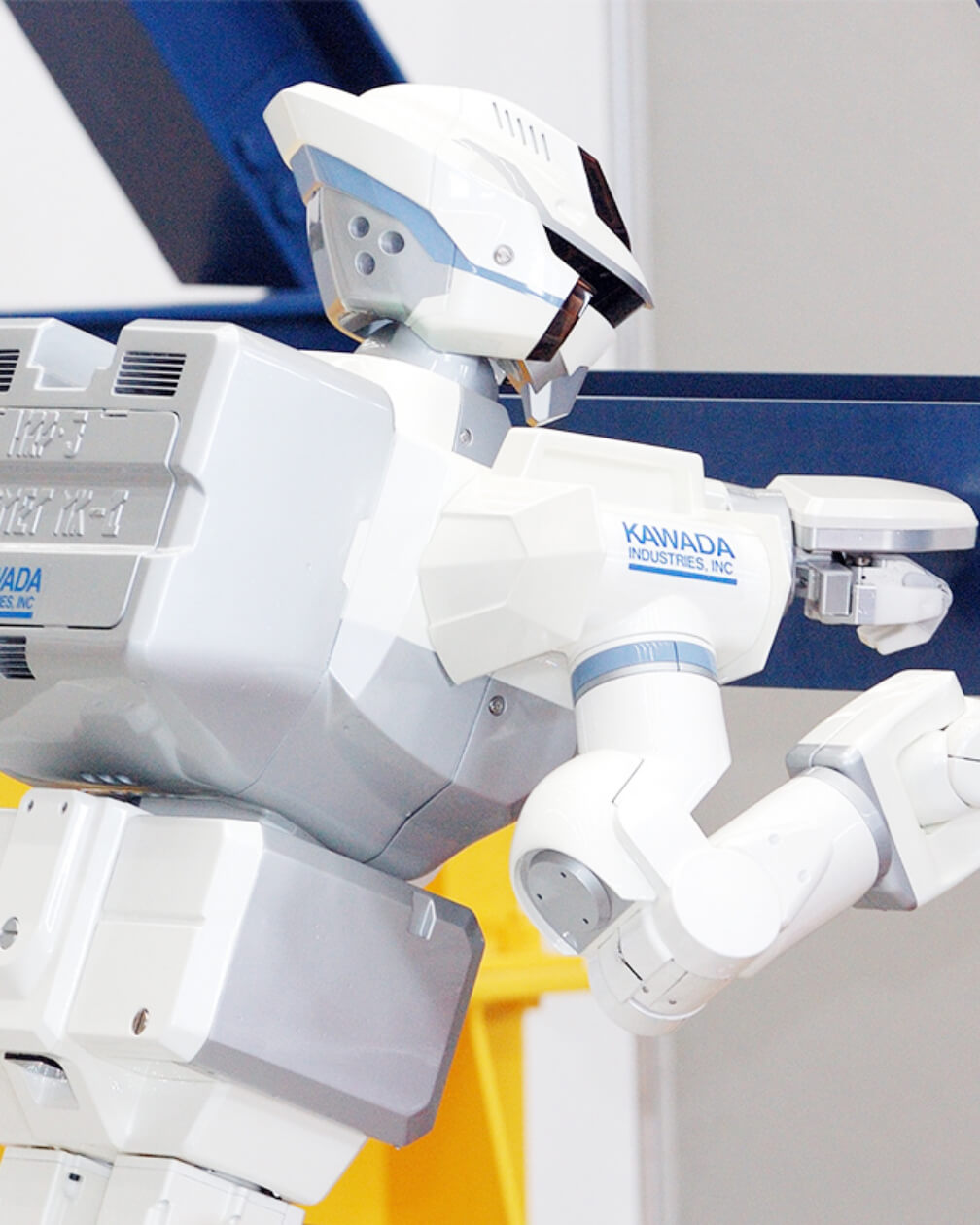

HRP-3 Promet Mk-Ⅱ
A research platform developed as the final product of the "Research and Development of Fundamental Technologies for Humanoid Robots Working in Real Environments" project by NEDO.
Features include dustproof and drip-proof functions, walking on slippery surfaces, an expanded work range with coordinated leg and arm control, and improved walking functions with high-power, high-efficiency actuators.
[Height:160cm, Weight:68kg, 42 degrees of freedom.]


HRP-4
A research platform developed in collaboration with the National Institute of Advanced Industrial Science and Technology (AIST), aiming to create a safe and practical humanoid robot for researchers.
Features include a lightweight and slim body, optimization of specifications, realization of low cost through standardization and simplification of parts, safety-conscious design such as the use of motors of 80W or less for all joint axes, and improved software development efficiency through the use of OpenRTM-aist.
[Height:151cm, Weight:39kg, 34 degrees of freedom.]
