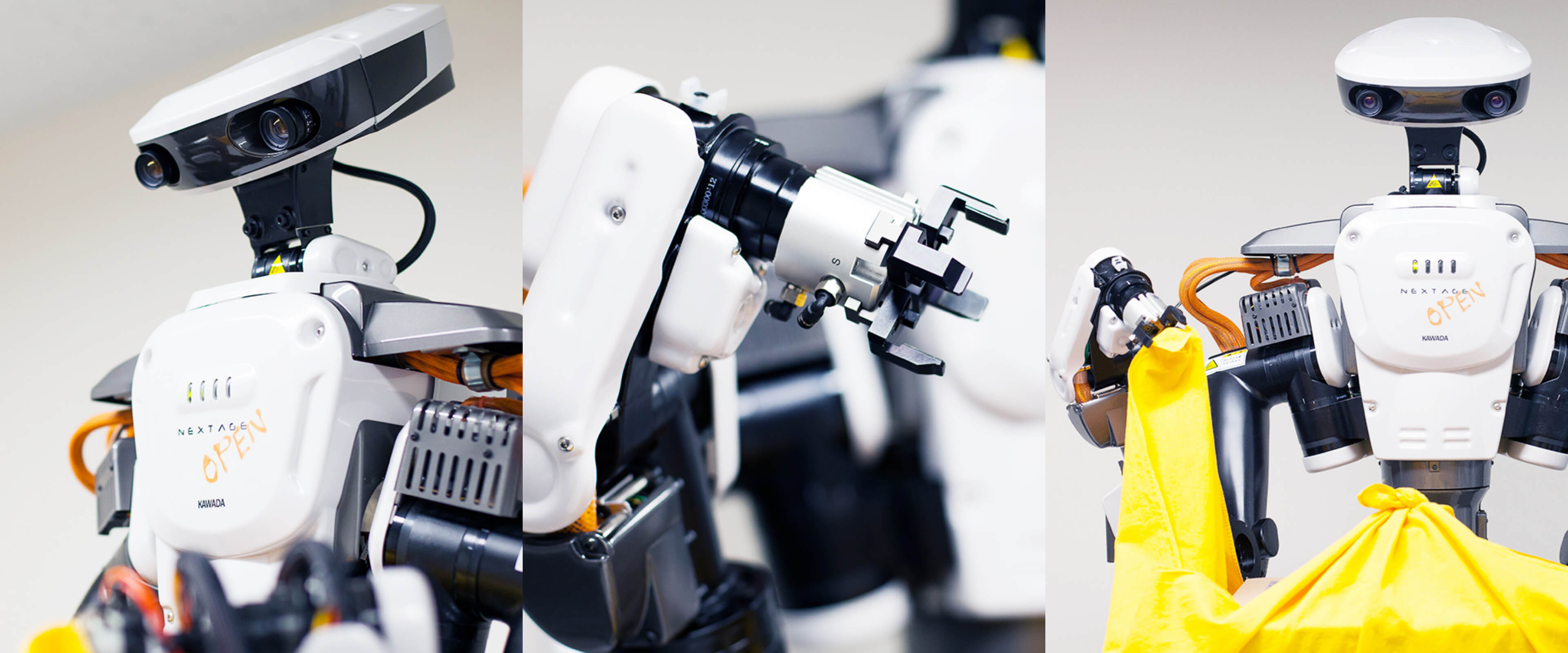
「人と共存する」というコンセプトのもと開発された産業用ロボットです。周囲の環境や作業対象を認識しながら作業する汎用性の高いロボットで、多品種変量生産にフレキシブルに対応します。


作業性の高いNEXTAGEのハードウエアが、研究開発に広く活用されているオープンなミドルウエア環境ROSに対応しました。OpenRTM-aistをベースにしているため、リアルタイム性にも優れています。ROSに対応した多種多様なソフトウエアやデバイスとの連携により、最先端の研究開発に適用可能な、等身大のヒューマノイドプラットフォームです。
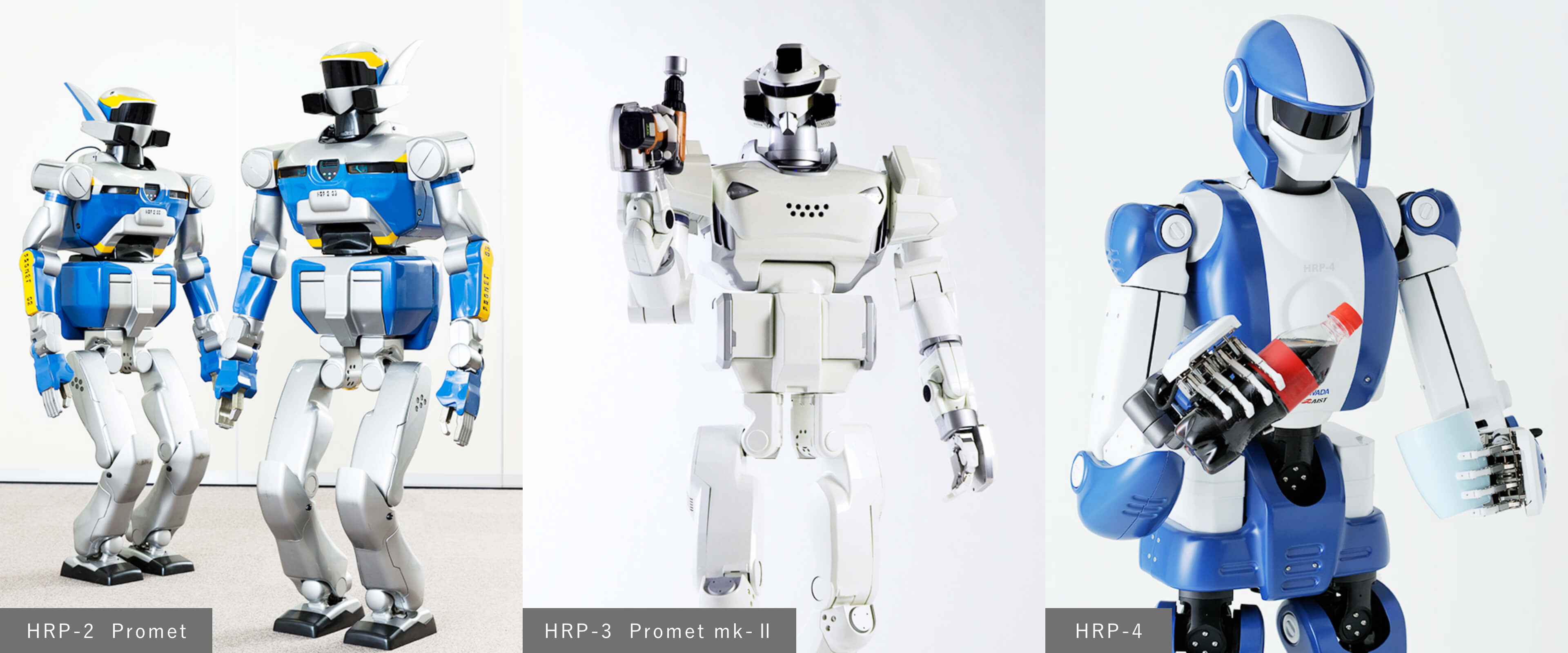


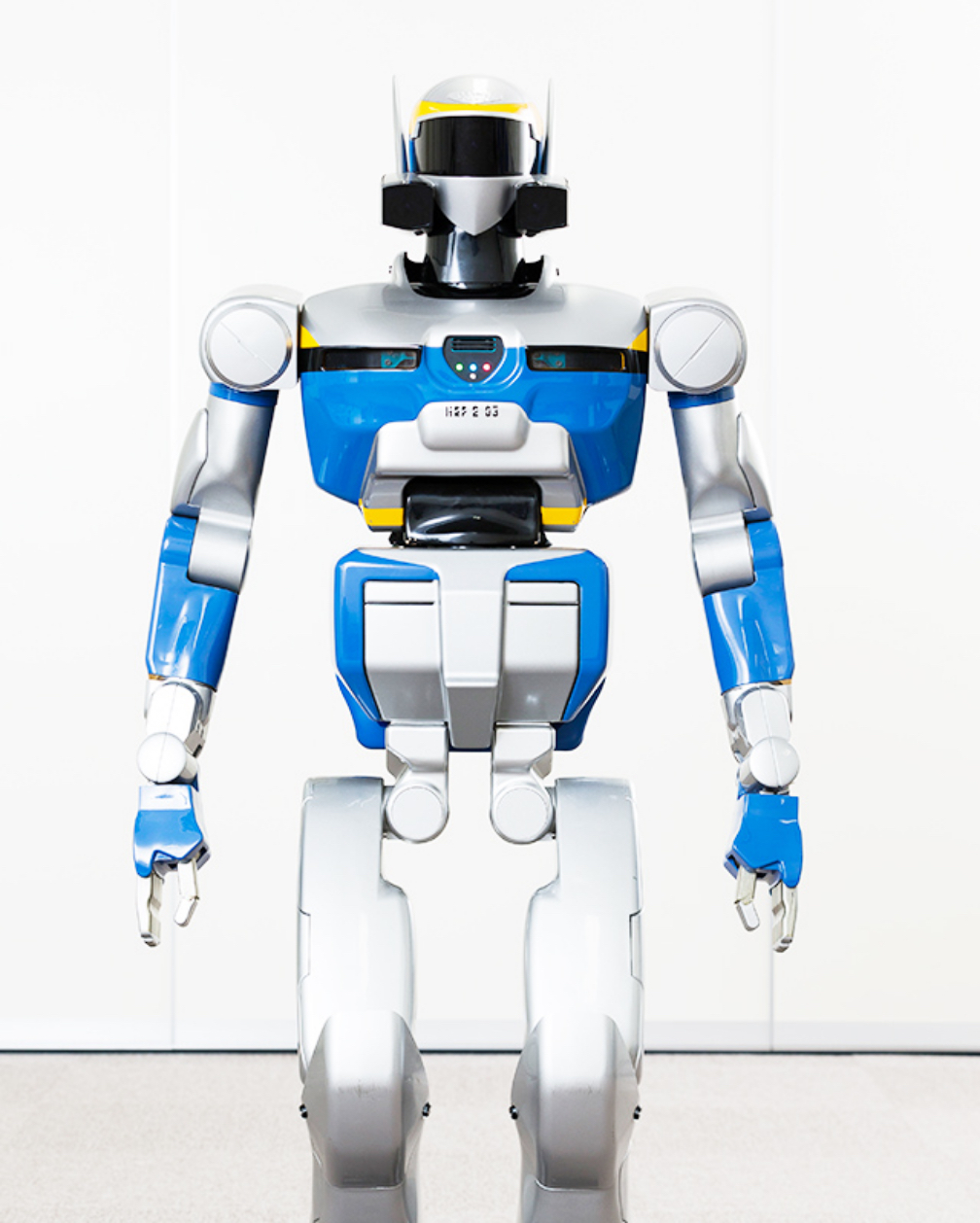
HRP-2 Promet
経済産業省による「人間協調・共存型ロボットシステムの研究開発」の成果機。股関節が片持ち構造で隘路の歩行が可能な点、電装系の高密度実装によりバックパックを不要とした点に特徴があります。プラットフォームとして、学術研究の発展に貢献しています。2017年には、国立科学博物館「重要科学技術史資料(未来技術遺産)」に登録されました。 [身長:154cm 体重:58kg 30自由度]

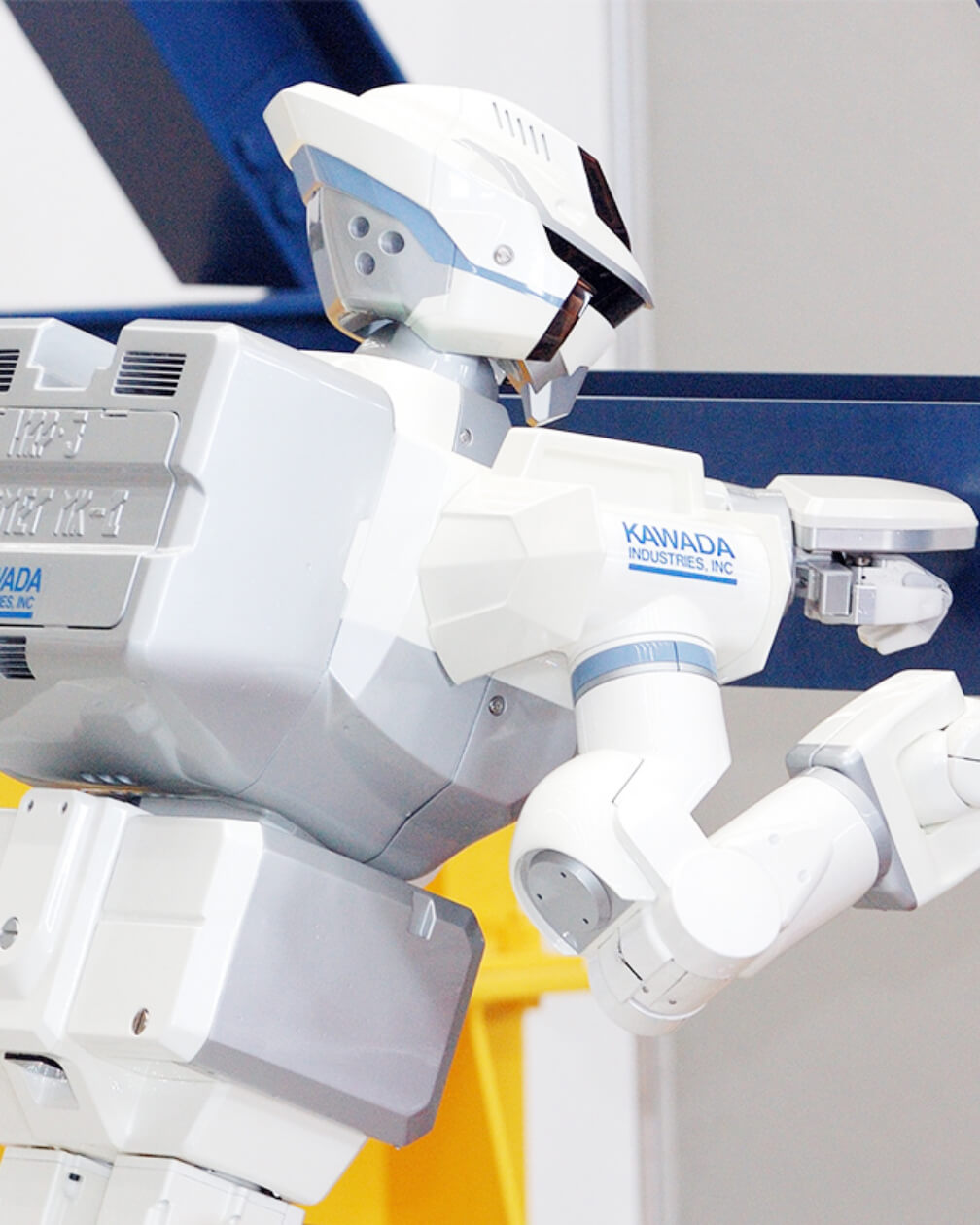

HRP-3 プロメテ Mk-Ⅱ
NEDOによる「実環境で働く人間型ロボット基盤技術の研究開発」の最終成果機として開発された研究用プラットフォーム。防塵防滴機能、滑りやすい路面での歩行、脚腕協調制御による作業範囲の拡大、高出力・高効率アクチュエータによる歩行機能の向上などが特徴。
[身長:160cm 体重:68kg 42自由度]


HRP-4
研究者にとって安全で実用的なヒューマノイドロボットを目指し、産業技術総合研究所と共同で開発された研究用プラットフォーム。軽量でスリムなボディー、仕様の最適化や部品の共通化・簡素化による低価格化の実現、すべての関節軸に80W以下のモーターを採用するといった安全性に配慮した設計、OpenRTM-aistの採用によるソフトウェアの開発効率の向上などが特徴。 [身長:151cm 体重:39kg 34自由度]

