#04
As a humanoid research platform
先端研究向けのヒト型ロボットプラットフォームとしてカワダロボティクスのロボティクス事業は、1999年に東京大学から受託した研究用二足歩行ロボット『H6』の設計・製作に始まります。自社開発の上体ヒューマノイド『HIRO(2001年発表)』、国家プロジェクトで開発した二足歩行ロボット『HRPシリーズ(2002年提供開始)』を経て、現在の研究開発用プラットフォームロボット『NEXTAGE OPEN』に至ります。オープンソースのロボット用ミドルウェア(ROS)が普及する前に一早く製品化し、進化を遂げながら15年以上にわたって提供を続けてきました。最新のROS版はあらゆる研究開発用途に世界中で活用されています。
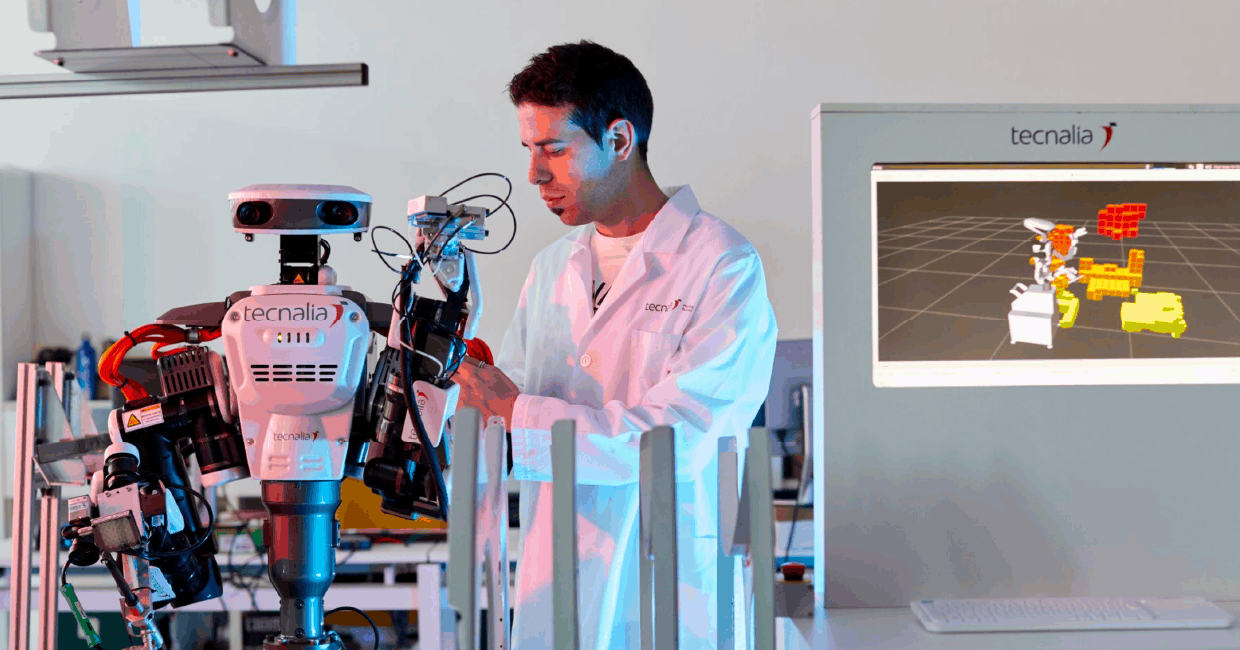
スペイン・バスク州にあるテクナリアは、同州の産学連携研究の核となる非営利の民間研究機構。高度なロボットソリューションを開発し、産業環境における要求の厳しい操作を自動化するための研究が行われている。連携の対象となるのは、ロボット技術の自社製品への統合や、製造プロセスにおける自律型産業用ロボットの使用など、ロボットによるイノベーションを実現したい企業。ケーブル駆動型ロボット、柔軟で多用途なロボット、協働型ロボットを軸として、新たなコンセプトの開発を促進している。ロボットに自律性や用途の多様性を提供し、工場に高度な柔軟性をもたらすため、ロボット工学研究にNEXTAGE OPENが活用されている。
人間は、環境や自身の身体の変化に適応することが非常に得意であり、数秒から数か月まで様々な時間スケールで再学習できる。同様の能力をもつ多用途で堅牢なロボットの実現を目指す同大学グループでは、NEXTAGE OPENを用いてロボットの動作合成をあらゆる側面から研究している。主な研究テーマは、大きな自由度を持つ擬人化ロボットシステムにおいて、最適な計画と制御を行うための学習アルゴリズム。確率的推論と学習、確率的最適制御、強化学習および徒弟学習、大規模最適化の分野における技術を採り入れ、擬人化ロボットシステムの現実世界で生じるリアルタイムの問題に取り組んでいる。